高精度地圖數(shù)據(jù)播發(fā)與自動(dòng)駕駛控制器信息交互 信息系統(tǒng)集成服務(wù)的核心
隨著自動(dòng)駕駛技術(shù)向L3及以上級(jí)別邁進(jìn),高精度地圖(HD Map)已成為不可或缺的環(huán)境感知與決策基石。高精度地圖數(shù)據(jù)播發(fā)系統(tǒng)與自動(dòng)駕駛控制器(ADC)之間的高效、可靠、安全的信息交互,構(gòu)成了整個(gè)自動(dòng)駕駛系統(tǒng)正常運(yùn)行的“神經(jīng)系統(tǒng)”。實(shí)現(xiàn)這一復(fù)雜交互,高度依賴于專業(yè)、系統(tǒng)的信息系統(tǒng)集成服務(wù)。
一、 交互鏈路概覽:從數(shù)據(jù)源到車輛控制
整個(gè)信息交互流程是一個(gè)閉環(huán)的數(shù)據(jù)流與指令流,主要涉及以下幾個(gè)關(guān)鍵環(huán)節(jié):
- 數(shù)據(jù)源與云端平臺(tái):高精度地圖數(shù)據(jù)由專業(yè)圖商或車企自研團(tuán)隊(duì)制作、更新和維護(hù),存儲(chǔ)在云端平臺(tái)。數(shù)據(jù)不僅包含厘米級(jí)精度的道路幾何、車道線、交通標(biāo)志等靜態(tài)層,還融合了實(shí)時(shí)或準(zhǔn)實(shí)時(shí)的動(dòng)態(tài)層信息(如交通事件、天氣、施工區(qū))。
- 數(shù)據(jù)播發(fā)系統(tǒng):作為信息分發(fā)的“中樞”,播發(fā)系統(tǒng)負(fù)責(zé)根據(jù)車輛位置、規(guī)劃路徑、訂閱需求等,從云端篩選、打包、壓縮并加密相關(guān)的高精度地圖數(shù)據(jù)塊(通常是Tile或Segment形式)。播發(fā)可通過(guò)蜂窩網(wǎng)絡(luò)(4G/5G V2X)、C-V2X直連通信或未來(lái)結(jié)合衛(wèi)星互聯(lián)網(wǎng)等多種方式實(shí)現(xiàn)。
- 車載通信與計(jì)算單元:車輛通過(guò)T-Box、V2X通信模塊等接收數(shù)據(jù)流。數(shù)據(jù)經(jīng)過(guò)解密、解壓后,被傳輸至車載計(jì)算平臺(tái)(或直接集成在其中的地圖引擎模塊)。
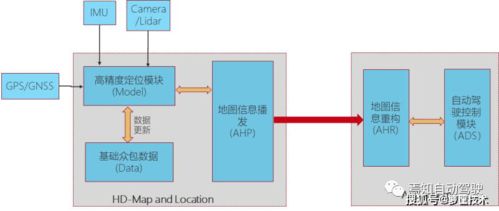
- 自動(dòng)駕駛控制器(ADC):這是交互的“大腦”端。ADC中的定位、感知、規(guī)劃、決策等模塊,需要實(shí)時(shí)、準(zhǔn)確地調(diào)用和處理高精度地圖數(shù)據(jù)。交互的核心在于API(應(yīng)用程序接口)和數(shù)據(jù)格式協(xié)議。
二、 核心交互內(nèi)容與協(xié)議
高精度地圖數(shù)據(jù)與ADC的交互不是簡(jiǎn)單的文件傳輸,而是高度結(jié)構(gòu)化、標(biāo)準(zhǔn)化的信息交換:
- 定位增強(qiáng):ADC的定位模塊(融合GNSS、IMU、激光雷達(dá)、攝像頭等)將車輛粗略位置發(fā)送給地圖引擎,地圖引擎返回該位置周邊的高精度道路模型,用于地圖匹配(Map Matching),將車輛精準(zhǔn)錨定在特定車道內(nèi),彌補(bǔ)傳感器在惡劣天氣或特征缺失場(chǎng)景下的不足。
- 感知輔助與冗余:地圖數(shù)據(jù)中的靜態(tài)層(如車道線曲率、坡度、交通標(biāo)志位置)可以提前“告知”感知系統(tǒng)應(yīng)該關(guān)注哪里,起到先驗(yàn)知識(shí)引導(dǎo)和驗(yàn)證傳感器識(shí)別結(jié)果的作用,提升感知的準(zhǔn)確性和效率。
- 規(guī)劃與決策支持:這是交互的核心價(jià)值所在。ADC的規(guī)劃模塊根據(jù)目的地,向地圖引擎請(qǐng)求全局路徑和詳細(xì)的局部車道級(jí)拓?fù)湫畔ⅰ5貓D數(shù)據(jù)提供車道級(jí)的可通行區(qū)域、交通規(guī)則(如限速、轉(zhuǎn)向限制)、推薦路徑等,為路徑規(guī)劃和行為決策(如變道、進(jìn)出匝道)提供關(guān)鍵輸入。動(dòng)態(tài)層信息則直接影響實(shí)時(shí)決策,如前方事故預(yù)警觸發(fā)提前換道。
- 數(shù)據(jù)更新與反饋:車輛傳感器感知到的與地圖不一致的信息(如新增臨時(shí)路障),可以通過(guò)ADC處理后,經(jīng)安全校驗(yàn)回傳給云端,參與眾包更新,形成“數(shù)據(jù)采集-云端融合-播發(fā)下發(fā)-車輛使用-反饋更新”的閉環(huán)。
為了實(shí)現(xiàn)上述交互,行業(yè)普遍采用或正在制定標(biāo)準(zhǔn)協(xié)議,如NDS(Navigation Data Standard)用于存儲(chǔ)和更新,SENSORIS、OpenLABEL等用于數(shù)據(jù)格式與標(biāo)注,以及基于gRPC、MQTT等的高效通信API。
三、 信息系統(tǒng)集成服務(wù)的角色與挑戰(zhàn)
將地圖播發(fā)系統(tǒng)、通信網(wǎng)絡(luò)、車載硬件、ADC軟件等異構(gòu)組件無(wú)縫連接,正是信息系統(tǒng)集成服務(wù) 的用武之地。其主要任務(wù)包括:
- 架構(gòu)設(shè)計(jì)與接口標(biāo)準(zhǔn)化:設(shè)計(jì)車-云協(xié)同的整體系統(tǒng)架構(gòu),定義清晰的軟硬件接口、數(shù)據(jù)格式和通信協(xié)議,確保各模塊之間“說(shuō)同一種語(yǔ)言”。
- 通信鏈路集成與優(yōu)化:集成不同網(wǎng)絡(luò)制式(5G、C-V2X),實(shí)現(xiàn)網(wǎng)絡(luò)無(wú)縫切換,優(yōu)化數(shù)據(jù)包大小、播發(fā)頻率和優(yōu)先級(jí)(如前方急彎數(shù)據(jù)優(yōu)先),以平衡實(shí)時(shí)性、精度和通信成本。
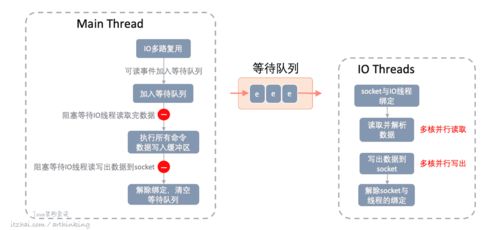
- 車載系統(tǒng)集成:將地圖引擎、數(shù)據(jù)解析模塊與ADC的感知、定位、規(guī)劃模塊深度集成,確保低延遲、高吞吐量的數(shù)據(jù)訪問(wèn)。這涉及復(fù)雜的中間件(如ROS2、DDS)適配和資源調(diào)度。
- 安全與冗余保障:實(shí)施端到端的數(shù)據(jù)加密、身份認(rèn)證和完整性校驗(yàn),防止數(shù)據(jù)篡改。設(shè)計(jì)降級(jí)策略,在網(wǎng)絡(luò)中斷或數(shù)據(jù)異常時(shí),ADC能基于局部地圖或傳感器獨(dú)立運(yùn)行,保障基本安全。
- 測(cè)試與驗(yàn)證:搭建仿真和實(shí)車測(cè)試環(huán)境,對(duì)整個(gè)交互鏈路進(jìn)行功能、性能、壓力和安全測(cè)試,確保在復(fù)雜場(chǎng)景下的可靠性。
面臨的挑戰(zhàn)包括:海量數(shù)據(jù)帶來(lái)的帶寬與存儲(chǔ)壓力、毫秒級(jí)端到端延遲要求、不同供應(yīng)商組件間的兼容性問(wèn)題、嚴(yán)格的功能安全(ISO 26262)與信息安全(ISO/SAE 21434)標(biāo)準(zhǔn)符合性,以及成本控制。
四、 未來(lái)發(fā)展趨勢(shì)
交互模式將向更實(shí)時(shí)、更智能、更協(xié)同的方向演進(jìn):
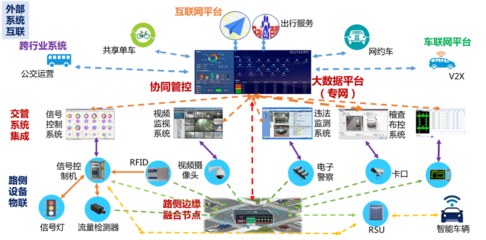
- 云-邊-端協(xié)同計(jì)算:部分地圖融合與計(jì)算任務(wù)下沉到路側(cè)邊緣節(jié)點(diǎn)(RSU),減少云端到車輛的延遲。
- 動(dòng)態(tài)地圖實(shí)時(shí)構(gòu)建:車輛傳感器數(shù)據(jù)實(shí)時(shí)上傳,在云端或邊緣快速融合生成“鮮活”的動(dòng)態(tài)地圖,并即刻播發(fā)給周邊車輛,實(shí)現(xiàn)群體智能。
- 與車路協(xié)同深度融合:高精度地圖與V2X消息(如SPaT信號(hào)相位)深度耦合,為ADC提供超視距、全局最優(yōu)的決策依據(jù)。
結(jié)論:高精度地圖數(shù)據(jù)播發(fā)與自動(dòng)駕駛控制器的信息交互,是一個(gè)涉及多學(xué)科、多技術(shù)的復(fù)雜系統(tǒng)工程。其效能直接決定了自動(dòng)駕駛系統(tǒng)的安全性、舒適性和可靠性。專業(yè)的信息系統(tǒng)集成服務(wù)通過(guò)頂層設(shè)計(jì)、技術(shù)整合與持續(xù)優(yōu)化,是打通從“數(shù)據(jù)”到“控制”最后一公里,構(gòu)建穩(wěn)定、高效、可進(jìn)化的自動(dòng)駕駛數(shù)據(jù)生態(tài)的關(guān)鍵使能者。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.lichunming.cn/product/47.html
更新時(shí)間:2026-05-20 12:21:29